Research
Accelerated Multiscale Modelling of Heterogeneous Catalysis
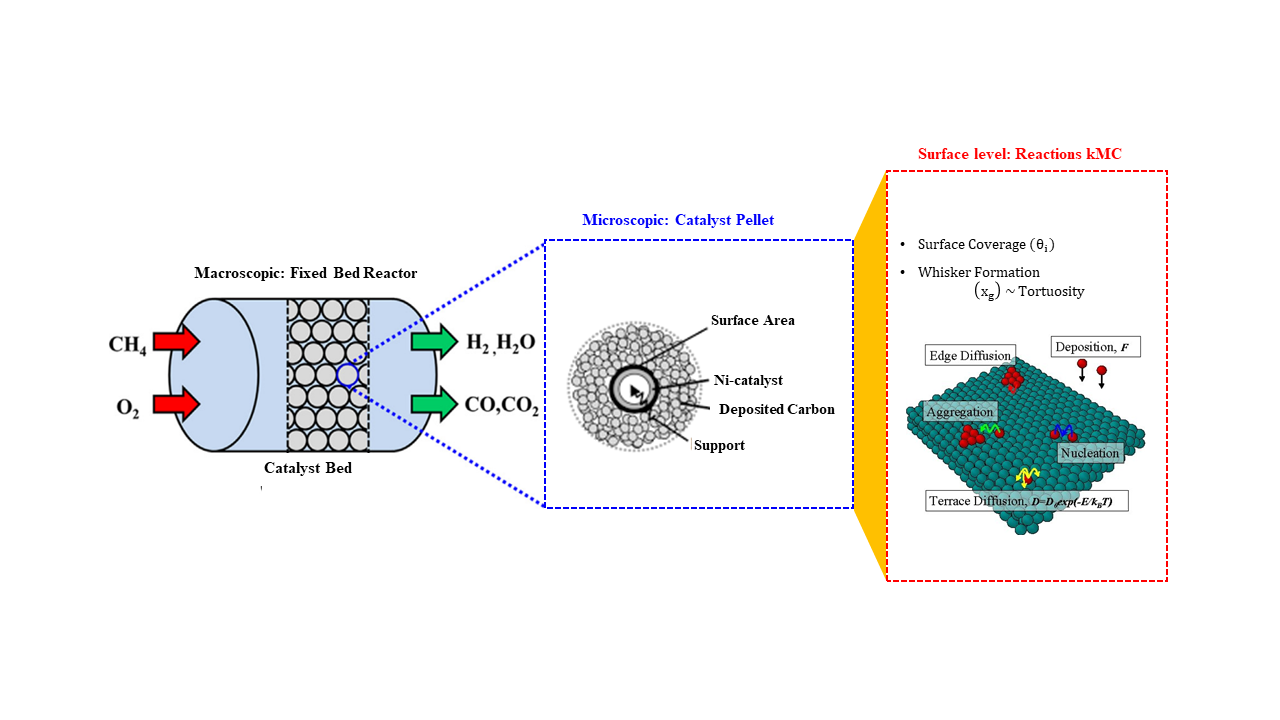 Kinetic Monte Carlo (KMC) is a widely employed technique for studying various phenomena such as transport, material properties, and chemical reactions, bridging the gap between the microscopic and macroscopic worlds. It serves as a crucial tool in understanding atomistic diffusion and catalysis. However, existing multiscale surface kinetic Monte Carlo simulation methods have limitations, leading to inconsistencies between theoretical and experimental findings. In our research, we aim to enhance these multiscale models by:
Kinetic Monte Carlo (KMC) is a widely employed technique for studying various phenomena such as transport, material properties, and chemical reactions, bridging the gap between the microscopic and macroscopic worlds. It serves as a crucial tool in understanding atomistic diffusion and catalysis. However, existing multiscale surface kinetic Monte Carlo simulation methods have limitations, leading to inconsistencies between theoretical and experimental findings. In our research, we aim to enhance these multiscale models by:
- Developing frameworks that enable macroscopic computations over large space-time scales using microscopic simulations initialized at smaller scales.
- Distinguishing between “slow” and “fast” processes, treating the former stochastically at the KMC level and the latter deterministically.
- Introducing the concept of a super basin, representing a set of lattice configurations accessible through quasi-equilibrated processes.
Through these improvements, we seek to advance the accuracy and applicability of multiscale surface kinetic Monte Carlo simulations, fostering better agreement with experimental observations and theoretical investigations.
Multiscale Modeling of Crystallization
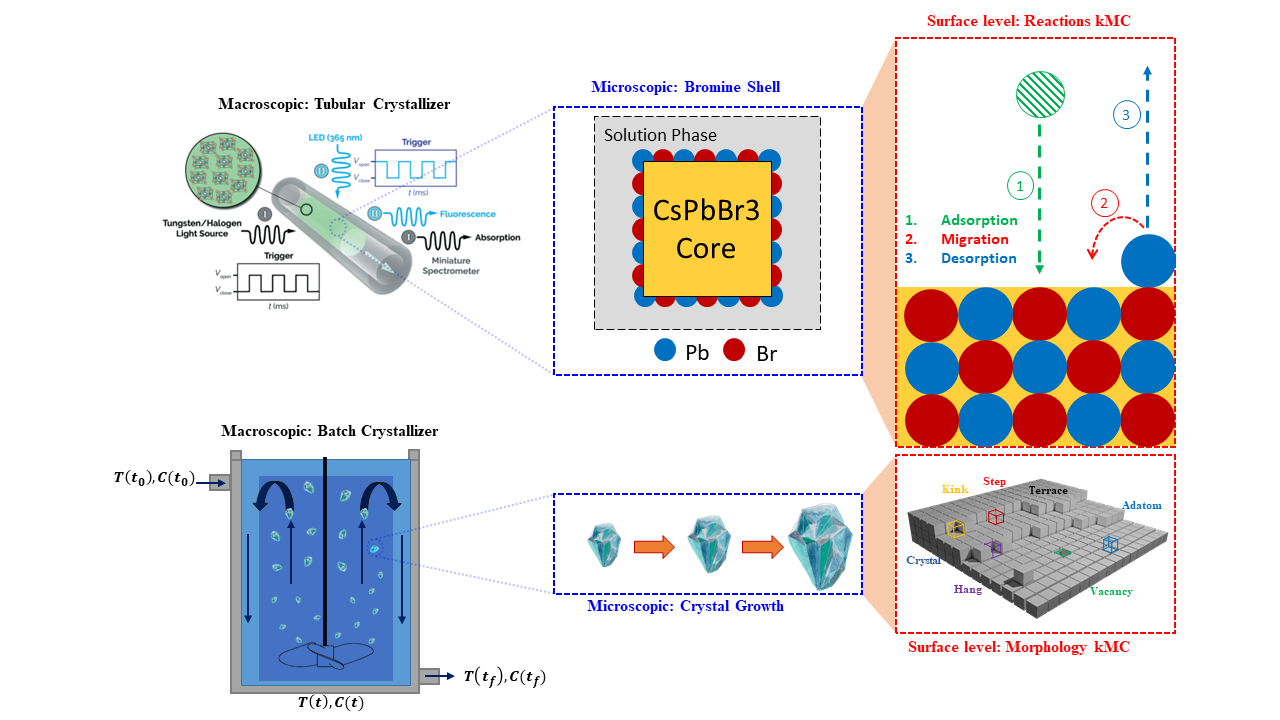
The research objective is to develop a multiscale model to explain the anisotropic growth of crystals which have applications as quantum dots, LEDs, optoelectronics, and pharmaceuticals. Recent literature shows that the size of nanocrystals (NCs) is inversely dependent on the bromine concentration which certainly is a very counter-intuitive thing as compared to traditional crystallization. To explain such growth dependence needs modification to traditional crystallization models. We could mimic this observation by incorporating physisorption, chemisorption, migration, and desorption events in a traditional solid-on-solid KMC model. The proposed modeling framework can be utilized broadly to explain the crystallization kinetics of the family of ABX3 perovskite NCs and Proteins, having a massive impact on the scientific community.
Literature:
Sitapure, N., Qiao, T., Son, D.H. and Kwon, J.S.I., 2020. Kinetic Monte Carlo modeling of the equilibrium-based size control of CsPbBr3 perovskite quantum dots in strongly confined regime. Computers & Chemical Engineering, 139, p.106872.
Microwave Reactor Modeling
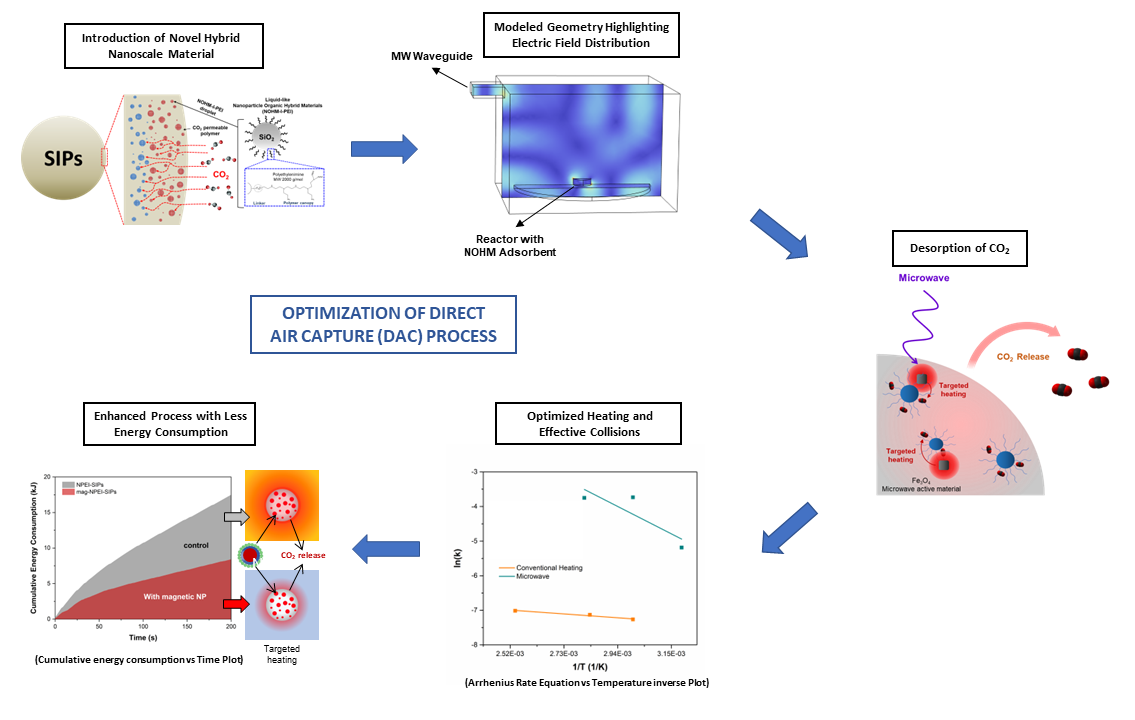
Direct Air Capture (DAC) process involves adsorption of CO2 and subsequently, the prime task is to get rid of the adsorbed CO2, through the process of regeneration that is achieved by heating. In our group, we simulate the system of the adsorbent during the regeneration process to study the spatiotemporal distribution of the temperature inside the Hybrid Nanoscale Multifunctional Material that has been designed with special properties to achieve the optimal targeted heating, under the subjugation of microwave. The key motive of this high-fidelity model is to deal with the optimization of the adsorbent material design, designating the combination of parameters that result in the novelty of the adsorbent material. The overall methodology saves the total energy consumption in the process of regeneration, hence making the DAC process more sustainable and cost-effective, which holds immense value as there is a dire need to achieve the net-zero targets by the year 2050.
Literature:
Rim, G., Feric, T.G., Moore, T. and Park, A.H.A., 2021. Solvent-impregnated polymers loaded with liquid‐like nanoparticle organic hybrid materials for enhanced kinetics of direct air capture and point source CO2 capture. Advanced Functional Materials, 31(21), p.2010047.
Bhavsar, R. P., Bhadriraju, B., Lee, G. A., Nagpal, S., Park, A. H. A., & Kwon, J. S. I., 2024. A multiphysics model for predicting spatiotemporal temperature profiles in microwave-heated carbon capture processes. Chemical Engineering Journal, 495,152977.
Multiscale Modeling and Control for Lignocellulosic Biomass Fractionation
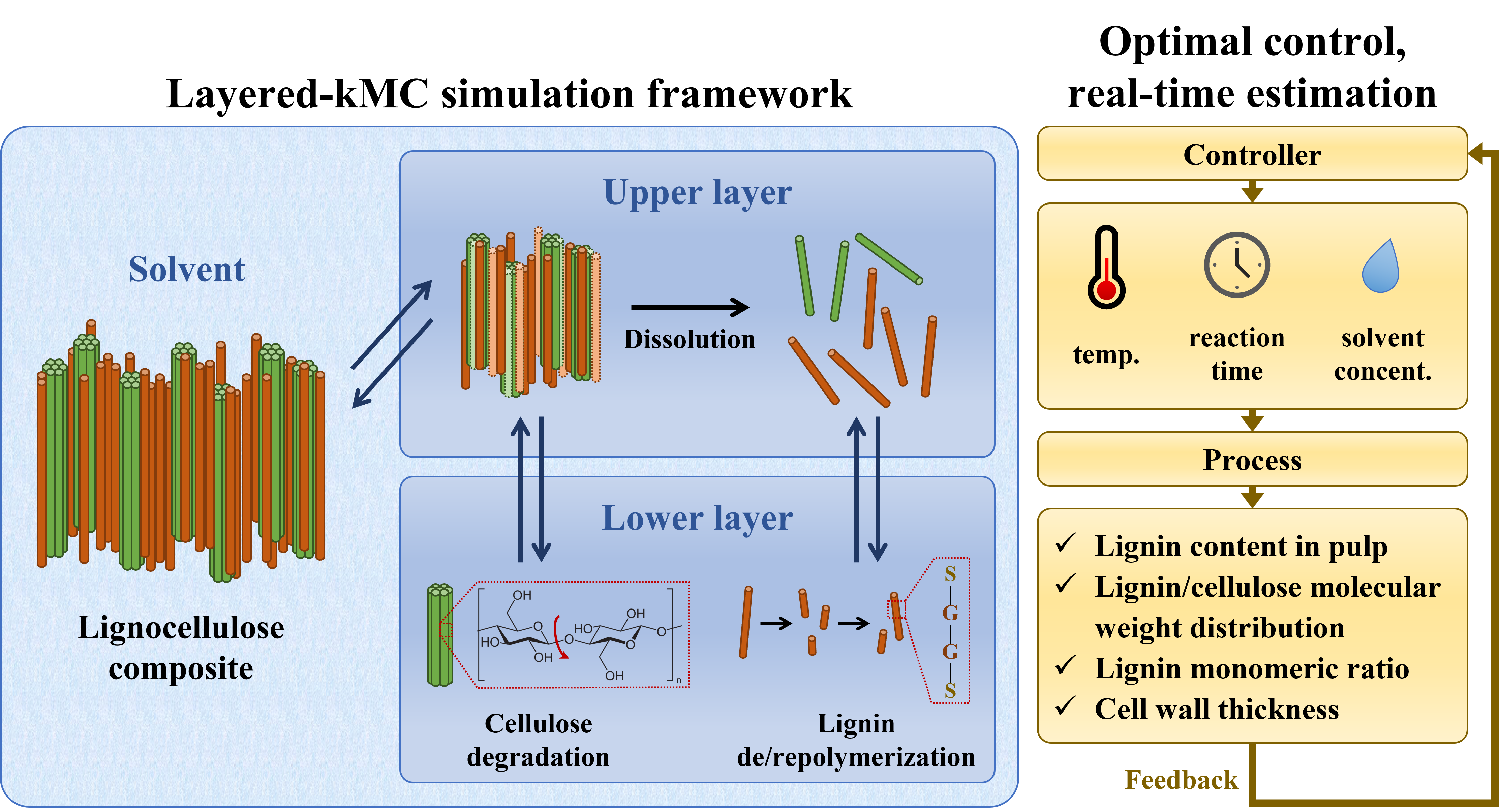
1. Despite the potential of lignocellulosic biomasses to offer versatile and alternative resources, it is still challenging to harvest the materials effectively due to their complicated structure.
2. In collaboration with our experimental partners, we developed and validated a multiscale model that enables tracking the spatial and temporal evolution of biomass.
3. Since key process outputs such as Kappa number, lignin/cellulose degree of polymerization, lignin monomer ratio, and other cell wall properties are not directly measurable during operation, we designed a model-based feedback controller to estimate these variables and obtain the desired product quality.
2. In collaboration with our experimental partners, we developed and validated a multiscale model that enables tracking the spatial and temporal evolution of biomass.
3. Since key process outputs such as Kappa number, lignin/cellulose degree of polymerization, lignin monomer ratio, and other cell wall properties are not directly measurable during operation, we designed a model-based feedback controller to estimate these variables and obtain the desired product quality.
Literature:
S. Pahari, J. Kim, H.-K. Choi, M. Zhang, A. Ji, C.G. Yoo, and J.S.-I. Kwon, “Multiscale kinetic modeling of biomass fractionation in an experiment: Understanding individual reaction mechanisms and cellulose degradation”, Chem. Eng. J., 2023, 467, 143021. DOI: 10.1016/j.cej.2023.143021
J. Jung, H.-K. Choi, S.H. Son, J.S.-I. Kwon, and J.H. Lee, “Multiscale modeling of fiber deformation: Application to a batch pulp digester for model predictive control of fiber strength”, Comp. & Chem. Eng., 2022, 158, 107640. DOI: 10.1016/j.compchemeng.2021.
Multiscale Modeling and Control of Fiber Morphology in Paper Manufacturing
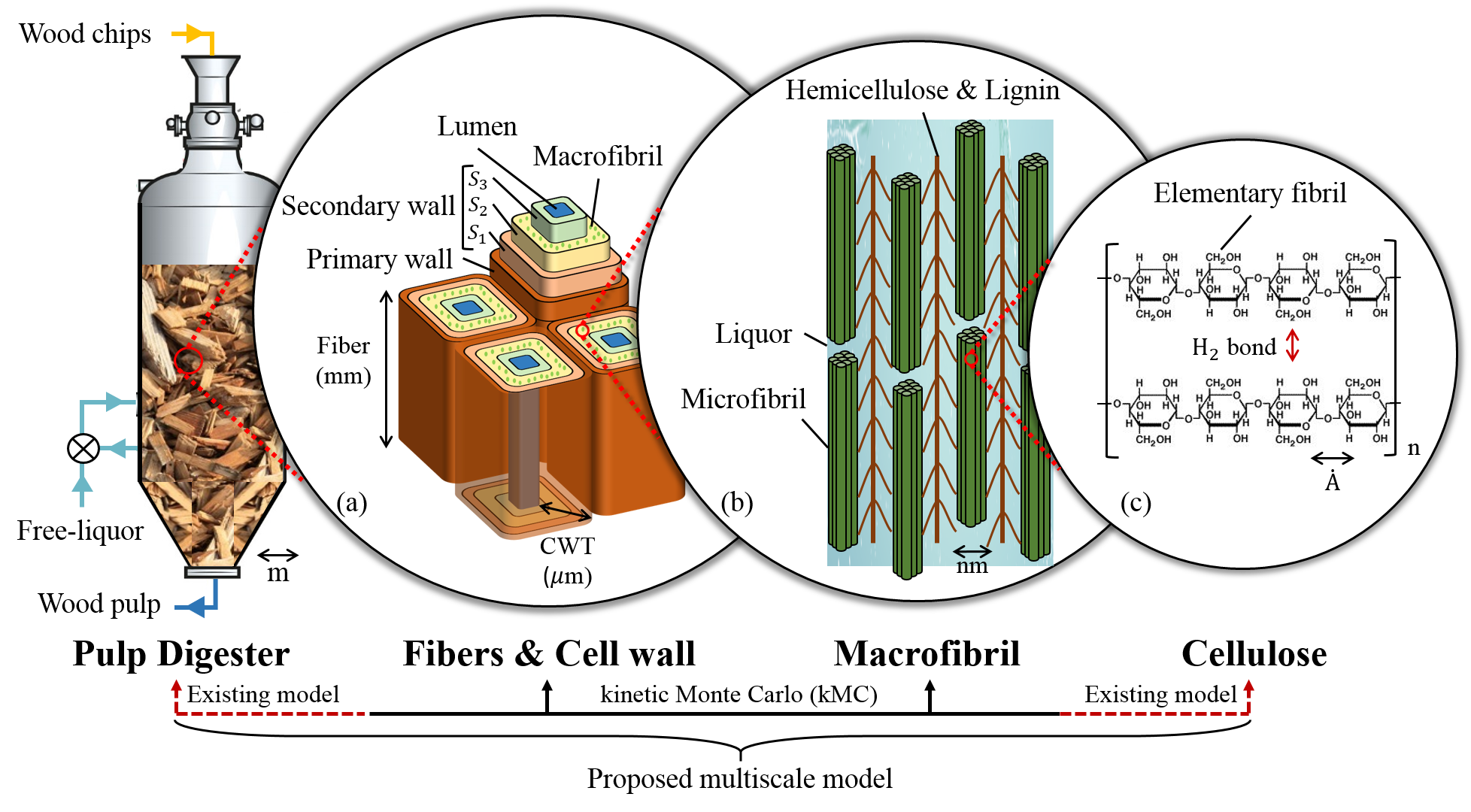 In pulping processes, wood chip properties extensively change as a result of delignification. Specifically, cellulose fiber morphology in the wood chip, such as fiber length and cell wall thickness (CWT), drastically changes and affects end-use paper product quality and recyclability. However, the evolution of this important microscopic paper property is not able to be described by existing mathematical models as they only focus on macroscopic properties such as the concentration profiles of components and the temperature profiles of the cooking liquor and wood chip.
In pulping processes, wood chip properties extensively change as a result of delignification. Specifically, cellulose fiber morphology in the wood chip, such as fiber length and cell wall thickness (CWT), drastically changes and affects end-use paper product quality and recyclability. However, the evolution of this important microscopic paper property is not able to be described by existing mathematical models as they only focus on macroscopic properties such as the concentration profiles of components and the temperature profiles of the cooking liquor and wood chip.
Motivated by this limitation, we developed a novel multiscale model by combining the mass continuity and thermal energy balance equations adopted from a modified “extended Purdue model” with a kinetic Monte Carlo algorithm to describe the microscopic events such as the evolution of CWT and Kappa number (i.e., residual lignin content in the wood pulp); otherwise, these microscopic properties of wood chips are not accessible by existing measurement techniques. To reduce the model complexity, a data-driven reduced-order model is developed, which is then used for designing a model-based feedback controller to regulate the microscopic properties of wood chips, which ultimately determine the paper properties (e.g., smoothness and stiffness) and recyclability.
Literature:
H. Choi and J. S. Kwon, “Modeling and control of cell wall thickness in batch delignification”, Comp. & Chem. Eng., 2019, 128, 512-523.
H. Choi and J. S. Kwon, “Multiscale modeling and control of Kappa number and porosity in a batch pulp digester”, AIChE J. 2019, 65(6), e16589.
Hybrid Modeling
Application of Hybrid Modeling to Fermentation Processes
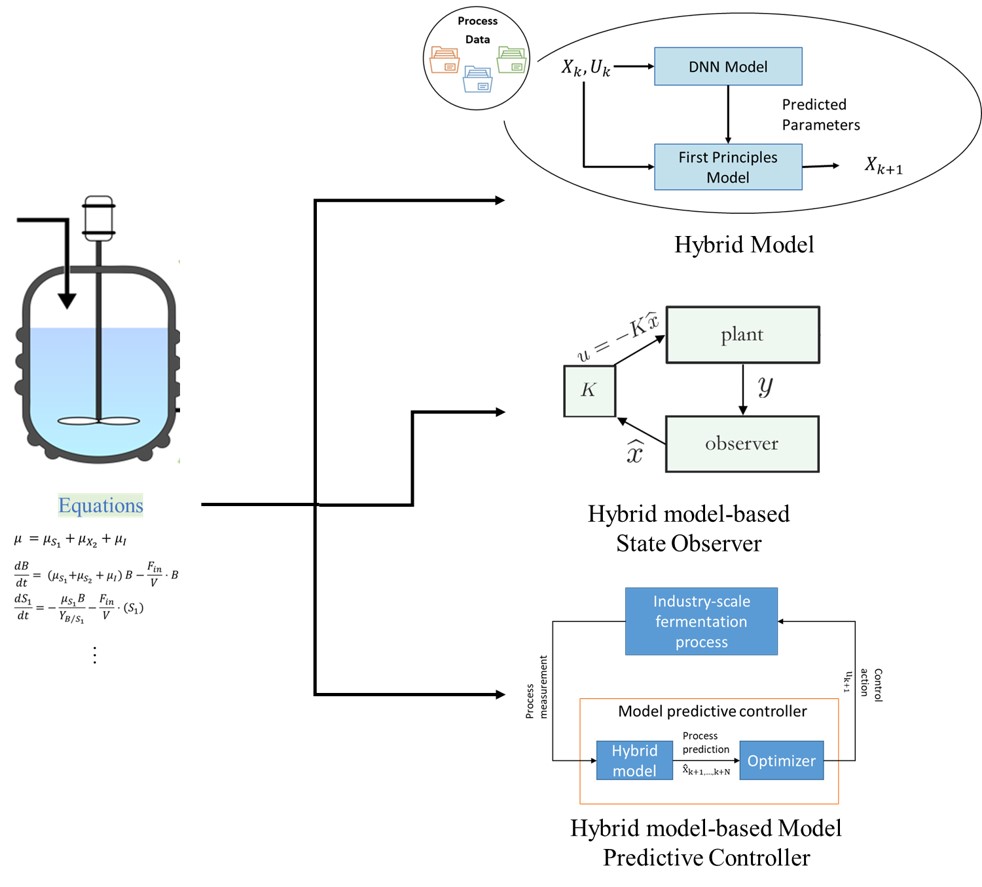
Kinetic modeling of fermentation processes is challenging due to complex micro-organism reactions and incomplete system knowledge. We have developed a hybrid modeling approach that combines kinetic and data-based models to improve accuracy and robustness. By integrating a deep neural network (DNN) with the kinetic model, we predict uncertain parameters and capture time-varying dependencies. The developed model is tested against an industrial-scale fermenter with a capacity of over 100,000 gallons. In the chemical industry, digital twins and optimal control algorithms are important for profitability. To overcome the challenges of limited sensors and infrequent measurements, we design a multi-rate state observer and a model predictive controller (MPC) for an industry-scale fermentation process to optimize input profiles and enhance productivity while considering process constraints.
Literature:
Shah, P., Sheriff, M. Z., Bangi, M. S. F., Kravaris, C., Kwon, J. S. I., Botre, C., & Hirota, J. (2023). Multi‐rate observer design and optimal control to maximize productivity of an industry‐scale fermentation process. AIChE Journal, 69(2), e17946.
Shah, P., Sheriff, M. Z., Bangi, M. S. F., Kravaris, C., Kwon, J. S. I., Botre, C., & Hirota, J. (2022). Deep neural network-based hybrid modeling and experimental validation for an industry-scale fermentation process: Identification of time-varying dependencies among parameters. Chemical Engineering Journal, 441, 135643.
Hybrid Modeling of Chemical Processes
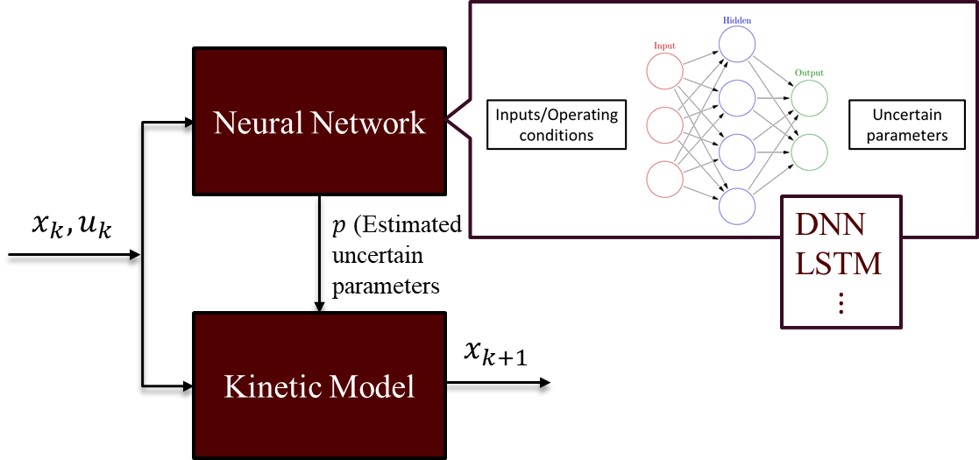
Our research group focuses on hybrid modeling, which combines physics-based models with data-driven techniques. While first-principles models capture process dynamics, they require significant resources and may struggle with complex mechanisms. Data-driven models are easy to construct but lack extrapolation and interpretability. We aim to develop efficient hybrid models that outperform machine learning-based models in terms of extrapolation and interpretation. Our approach involves using hybrid models to estimate unknown system dynamics in bio-fermentation. We develop first-principles models, conduct sensitivity analysis, and estimate time-varying parameters using neural networks. We have collaborated with multiple industrial partners and validated our models using data from lab-scale and industry-scale processes to ensure robustness. These hybrid models are integrated into a model predictive controller for optimal operation, enhancing productivity and cost efficiency while considering constraints. Our goal is to advance hybrid modeling, improve process understanding, and optimize chemical process operations through integration with state-of-the-art machine-learning approaches.
Literature:
Shah, M. Z. Sheriff, M. S. F. Bangi, C. Kravaris, J. S.-I. Kwon, C. Botre, and J. Hirota, “Deep neural network-based hybrid modeling and experimental validation for an industry-scale fermentation process: Identification of time-varying dependencies among parameters,” Chemical Engineering Journal, vol. 441, p. 135643, 2022.
Bangi, Mohammed Saad Faizan, and Joseph Sang-Il Kwon. “Deep hybrid modeling of a chemical process: Application to hydraulic fracturing.” Computers & Chemical Engineering 134 (2020): 106696.